

028-87409729
: 9:00-18:00
17348136089
: 7*24h
2025年7月26-29日,以“智能时代 同球共济”为主题的世界人工智能大会在上海举行,具身智能作为“AI如何走出屏幕”的现实命题备受关注。与上届大会相比,具身智能在技术方面从单模型向多模态跃迁,产品泛化能力和垂直应用均有提升,标准稳步建立,生态不断优化。
2025世界人工智能大会(图片来源于网络)
具身智能是什么?
具身智能是人工智能与认知科学领域的核心概念,指智能并非孤立存在于 “大脑”或计算单元中,而是源于物理身体、计算单元与环境之间的动态交互过程。其核心主张是:智能的产生依赖于 “具身性”(embodiment)—— 即物理身体的感知 - 行动能力、身体与环境的实时反馈,以及三者(身体、计算单元、环境)的持续互动,而非单纯的符号运算或抽象推理。

大段的概念性文字可能难以理解,下面我们举一个简单的例子:想象你要学做一道菜,普通人工智能就像一位美食理论家,能瞬间背诵1000本菜谱,告诉你每一个细节的步骤,但它从没摸过锅铲,甚至分不清糖和盐!
而像机器人厨师这样的具身智能虽然开始会炸糊锅、放错调料,但通过:摄像头观察油泡判断油温➟力传感器感受翻炒阻力➟试错反馈调整等步骤,最终就可以做出一份完美的菜品!
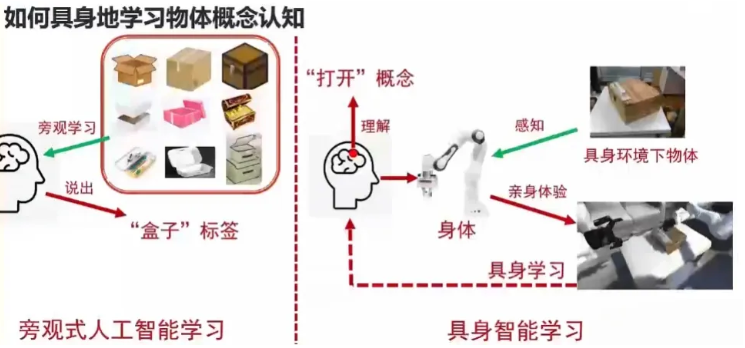
普通人工智能和具身智能对比(图片来源于网络)
近年来,随着技术迭代、经济转型、老龄化及劳动力短缺等社会需求的持续加剧,具身智能的发展成为了必然选择,通过人机协同重构生产力体系并推动人类文明进步。
具身智能:从概念破圈到场景开花
当前,全球具身智能正处于技术突破与产业落地并行的关键阶段。中美欧日等主要经济体在核心技术研发和场景应用上展开激烈竞争,多模态大模型与机器人硬件的深度融合推动感知 - 行动闭环能力显著提升,工业自动化、物流仓储、家庭服务等领域已出现规模化应用案例。

国家地方共建具身智能机器人创新中心(图片来源于网络)
2024年,中国信通院发布《具身智能发展报告(2024 年)》系统梳理技术体系,提出 “感知 - 决策 - 行动 - 反馈” 闭环架构。2025 年政府工作报告首次将具身智能列为未来产业重点培育方向,北京、上海等 12 个城市获批建设具身智能应用示范区,要求 2025 年底前开放不少于 50 个工业和服务业测试场景。

成都具身智能产业发展态势良好(图片来源于网络)
在这场全球竞速中,中国凭借政策红利、场景优势与产业链韧性,正从技术跟跑者加速成长为规则制定的重要参与者。
高速采集:具身智能的感知加速器
具身智能的核心生命力在于 “感知 - 行动” 闭环 的实时性与精准度,高速采集技术正是这一闭环的关键技术之一, 它通过可靠的数据捕获和分析,为智能体构建了与物理世界交互的 “快速通道”。
在复杂动态场景中,具身智能体需要同步处理视觉、触觉、力觉等多模态信号:例如,在 工业自动化产品质量检测 时,高速力觉传感器与工业CT扫描技术协同工作,传感器每秒能采集上千次接触力数据,与此同时,工业CT以高速扫描模式,在极短时间内完成对产品内部结构的三维数据采集。系统综合分析这些数据,就能精准检测出外壳是否存在细微裂纹、内部线路板焊点是否虚焊等问题,检测效率较传统人工抽检方式提升了数倍,

展望未来,具身智能的进步,将依托多维度技术协同与生态进化:一方面依赖高速采集等感知技术的迭代,夯实 “感知 - 行动” 闭环的实时性根基;另一方面需通用人工智能大模型与物理世界交互算法的深度融合,赋予智能体类人推理与环境泛化能力。
相信在未来,会有越来越多的具体智能体出现,带来更多改变,让人们的生活更加便捷、安全与自主。

